






Intelligent. Adaptable. Mission-Ready.
Octarotor UAV platform for payloads up to 5 kg. Supports onboard AI for semi-autonomous missions, real-time processing, sensor fusion, and object detection. Multiple camera and LiDAR payload options are available for various mission types, including surveillance, SAR, defence, and agriculture.
F1T is a tethered UAV, designed to work with Elistair SAFE T 2 – Intelligent Tethered Drone Station, to form a complete UAS. Since the electric power is supplied from the ground, flight time is theoretically unlimited. Drone is typically equipped with a DragonEye2 dual EO-IR stabilized camera, so the system can function as a 360°surveillance system from a height of up to 100m above the ground station.
DIOPTRA is an electric tailsitter fixed wing UAV with VTOL characteristics that is currently under development. Dioptra has been designed to host Micasense RedEdge Mx which is a rugged and precise multispectral camera for advanced agricultural analysis. This high-performance tool captures all of the spectral bands needed for crop health indices (green, red, red edge, and near-infrared), as well as a blue band for deeper insights into specific issues and composite RGB imagery.
MicaSense RedEdge Mx | Payload Weight: 0.232 kg
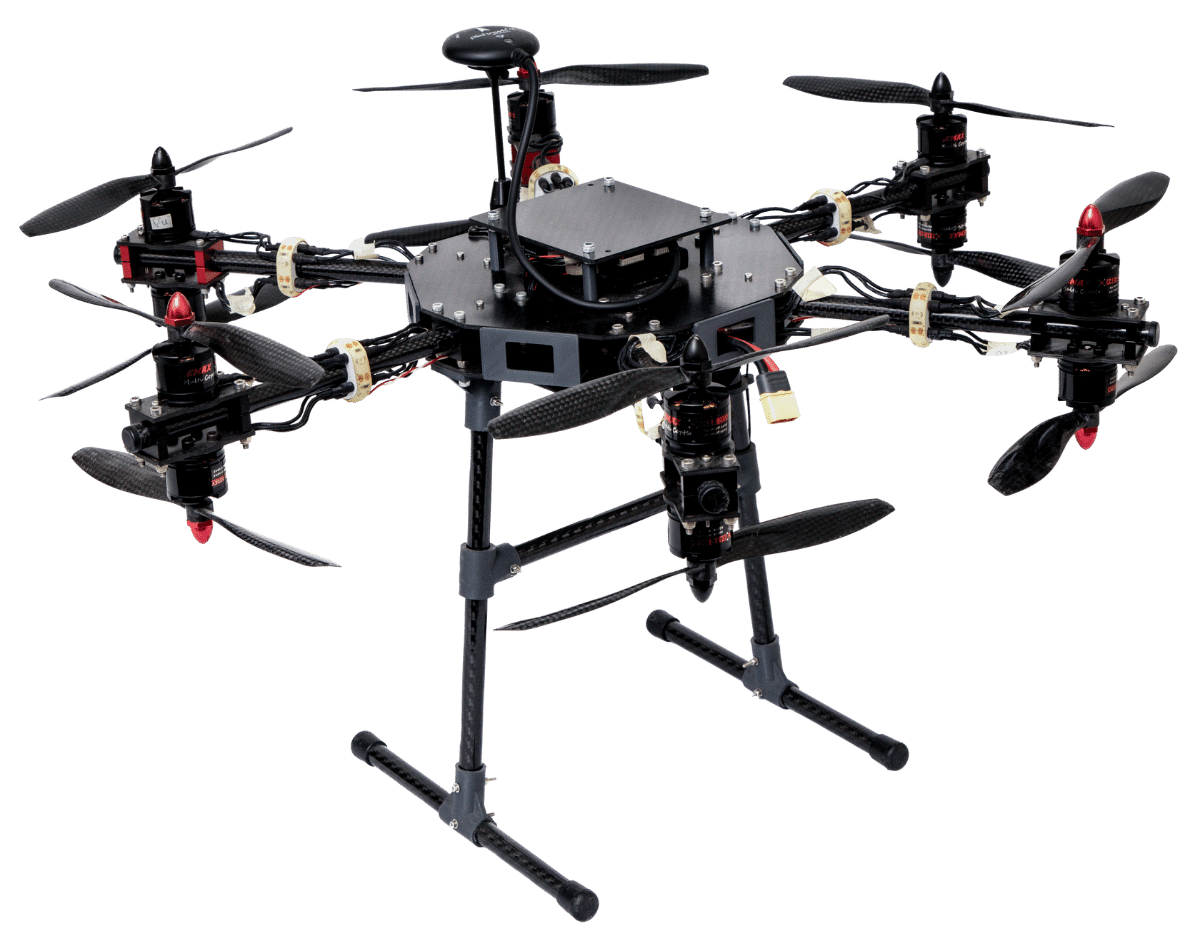
SAITA is a medium size dodecarotor UAV. It is a quiet agile and very steady drone due to its six pairs of coaxial motors. This mechanical characteristic also gives it an increased robustness against potential motor and/or ESC faults. It is mainly used for filming purposes using lightweight action cameras.
DUMMY is a low cost, lightweight UAV, which consists mainly of 3D printed parts. Its simple design with just four rotors and a low-profile landing gear, makes it easy to control, and thus it constitutes an ideal drone for testing flight algorithms. To further enhance this capability, Dummy can be equipped with a raspberry Pi (3,4) single-board computer.
MANTIS is a quad-rotor UAV designed to perform autonomous obstacle avoidance missions. It is equipped with the powerful NVIDIA Jetson Nano for onboard computation, enabling it to run advanced avoidance algorithms. MANTIS integrates a ZED Mini RGB-D camera, optimized for depth and motion detection, to assist with obstacle identification. With support for QGroundControl and Mission Planner, it allows autonomous waypoint missions.
Industrial-Grade. Endurance-Optimized. Mission-critical.
Quad-rotor UAV platform for payloads up to 10 kg. Features a redundant design and is ruggedized for harsh environments in VLOS/BVLOS missions. Equipped with an onboard AI computer and AIS receiver. Supports various payloads for surveillance, SAR, and defence missions.